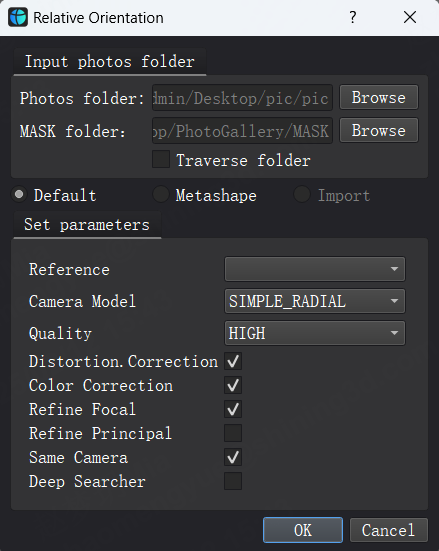
Relative Orientation¶
Calculates relative positions between photos and generates a sparse point cloud, requiring input photos to comply with photogrammetric principles.
Input Parameters¶
-
Photos folder: Path containing photos (formats: JPG, PNG, TIFF).
-
MASK folder: Path containing black-and-white subject masks (matched to photo filenames).
-
Traverse folder: Disabled by default; enable to search subfolders.
Methods¶
Default¶
Reference: Orients new photo sets using pre-oriented photo sets
Camera Model (Common):
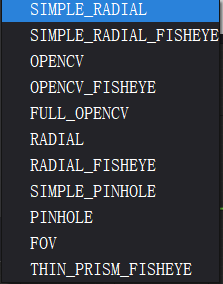
SIMPLE_RADIAL (f, cx, cy, k)
OPENCV (fx, fy, cx, cy, k1, k2, p1, p2)
FULL_OPENCV (fx, fy, cx, cy, k1–k6, p1, p2)
Quality¶
High Resolution (default) / Extreme / Medium / Low (Does not affect texture resolution)
Other Settings¶
-
Distortion Correction: Enabled (default), generates corrected images using intrinsic parameters.
-
Color Correction: Disabled (default), adjusts colors via tie points.
-
Refine Focal: Enabled (default), estimates focal length during calibration.
-
Refine Principal: Disabled (default).
-
Same Camera: Enabled (default), shares parameters for photos with identical specs.
-
Deep Searcher: Disabled (default), improves success for low-overlap cases.
Metashape¶
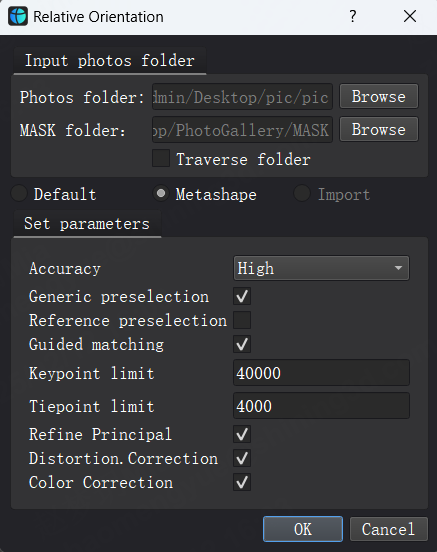
Accuracy: High (default) / Highest / Medium / Low / Lowest.
Generic Preselection: Enabled (default), auto-selects image pairs.
Reference Preselection: Disabled (default), uses GPS data for pair selection.
Guided Matching: Enabled (default), detects additional feature points.
Keypoint Limit: 40,000 (default).
Tiepoint Limit: 4,000 (default).
Distortion/Color Correction: Same as default method.
Import¶
Reconstruction: Enabled (default), computes sparse point clouds from imported camera poses.
Notes¶
-
Orientation Failure:
Ensure photo sets meet photogrammetric standards (overlap ≥ 50%). For low-overlap sets, skip to Absolute Orientation (reduces accuracy / efficiency).
-
Post-Orientation Checks:
Camera Positions: Verify spatial consistency with capture patterns (e.g., circular arrangement).
Sparse Point Cloud: Ensure alignment with physical object (no mislayers or offsets).
-
Low-Feature Objects:
For featureless subjects (e.g., white porcelain) or repetitive textures:
Enable Mainbody detection for both the object and a featured base.
Use the base’s texture to aid orientation.
Absolute Orientation
Aligns single photos with the 3D model using three methods (Structure Alignment, Texture Matching, or Control Points), then automates bulk alignment for all photos.
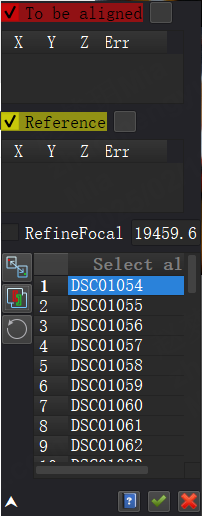
Single Photo Alignment¶
| Method | Workflow | Key Parameters |
|---|---|---|
| Register | 1. Roughly align the mesh with the photo. 2. Click Register. |
Requires initial rough alignment. |
| Match | 1. Match the mesh viewport to the photo. 2. Click Match. |
Refine Focal (optional). |
| Control Points | 1. Match viewports. 2. Use Alt to zoom, Left-click to mark points. 3. Press Space to toggle mesh / photo. 4. Align (requires ≥ 6 pairs). |
Refine Focal (optional). |
Additional Tools¶
-
Refine Focal: Enabled to recalculate focal length during alignment (higher value = longer focal length).
-
Global Structure Register: Disabled by default. Enable to auto-align all photos (requires manual pre-alignment).
-
Reset: Clear alignment data and control points.
-
Quick Align: Align photos onto the model for partial texturing.
*Note: Quick-aligned models lack UV optimization and serve only as alignment aids.
Global Alignment¶
Automatically aligns all photos after successful single alignment.
*Note: If global alignment fails (e.g., not auto-enabled), verify sparse point cloud density (perform a Dense Reconstruction).
Shortcuts¶
| Function | Shortcut |
|---|---|
| Zoom | Alt + Drag |
| Toggle Mesh / Photo View | Space |
Notes¶
-
Direct Apply Absolute Orientation:
-
Photos without Relative Orientation can be aligned individually with Absolute Orientation but cannot use global alignment.
-
Enable Refine Focal or manually input focal lengths for unoriented photos.
-
-
Control Point Requirements:
-
< 6 pairs: Alignment may fail or produce significant errors.
-
Mismatched pairs: Alignment aborted.
-
-
Software Crashes:
- Caused by non-triangular meshes or overly low polygon counts.