 Einstellungen¶
Einstellungen¶
Lichtquelle¶
| Lichtquelle | Scanmodus |
|---|---|
| Laser | Marker, Photogrammetrie, Mesh, Teilauflösung |
| Infrarot | Marker, Punktwolke |
Vorsicht
- Wenn gescannte Daten vorhanden sind, müssen diese vor dem Wechsel der Lichtquelle gelöscht werden.
- Alle Projekte innerhalb der Projektgruppe können nur dieselbe Lichtquelle verwenden, was bedeutet, dass die Lichtquelle des zweiten Projekts nicht geändert werden kann und mit dem ersten Projekt übereinstimmen muss.
Globale Markerdatei¶
Globale Markerdateien verbessern die Ausrichtungsgenauigkeit und reduzieren Fehler, indem sie mehrere Scandaten automatisch ausrichten.
Globale Markerdatei importieren¶
-
Keine globale Markerdatei im Ressourcen-Center:
Die globale Markerdatei wird als Keine angezeigt. Ein Klick fordert Sie auf, sich mit einem PC zu verbinden, um Dateien zu importieren oder von einem USB-Stick zu importieren. Für verwandte Vorgänge siehe Import von USB. -
Globale Markerdatei im Ressourcen-Center vorhanden:
Tippen Sie, um eine Datei aus der Liste der globalen Markerdateien auszuwählen.
Hinweis
- Globale Markerdateien unterstützen die Formate .p3, .asc, .txt und .dgm.
- Die Anzahl der Marker in der globalen Markerdatei muss während des Laserscannens ≥ 3 und während des Infrarotscannens ≥ 4 betragen, mit einem Maximum von 20.000 Punkten.
- Das Scannen von Punktwolken und die Verwendung von Merkmalen zur Ausrichtung unterstützen nicht die Verwendung von globalen Markerdateien.
Scanmodus¶
Dieser Modus wird verwendet, um globale Markerdateien zu erstellen. Durch das Scannen der Marker auf der Oberfläche eines Objekts können Sie schnell die Markerdaten des Objekts erhalten.
Nach dem Scannen können Sie die globale Markerdatei speichern oder in den Punktwolken-/Mesh-Modus wechseln, um das Scannen des Objekts fortzusetzen.
Hinweis
- Sie können globale Markerdateien importieren, um das Scannen fortzusetzen und globale Marker zu ergänzen.
- Der Wechsel von anderen Scanmodi in den Rahmenpunktmodus löscht vorhandene Scandaten und kann nicht wiederhergestellt werden.
-
Während des Scannens können Sie Farbindikatoren verwenden, um die Qualität des Scannens der globalen Marker zu bewerten.
- Wenn der äußere Kreis der globalen Marker orange erscheint, deutet dies darauf hin, dass die Qualität der gescannten globalen Marker niedrig ist, wie
 und
und  .
. - Wenn im äußeren Kreis der globalen Marker keine anderen Farben erscheinen, deutet dies darauf hin, dass die Qualität der gescannten globalen Marker normal ist, wie
 und
und  .
.
Dabei zeigen
und an, dass die gescannten Marker sich derzeit im Sichtfeld des Scanners befinden. - Wenn der äußere Kreis der globalen Marker orange erscheint, deutet dies darauf hin, dass die Qualität der gescannten globalen Marker niedrig ist, wie
Dieser Modus eignet sich allgemein für industrielle Messungen, die hohe Präzision erfordern. Je nach Größe des gescannten Objekts können Sie eine geeignete Maßstabsdatei importieren, um die Gesamgenauigkeit der Rahmenpunktdaten während des Scannens zu verbessern.
Hinweis
Das Gerät kann maximal 16 Maßstabsdateien speichern. Um eine neue Maßstabsdatei hinzuzufügen, gehen Sie bitte zum Ressourcen-Center, um Dateien zu löschen, bevor Sie neue Maßstabsdateien importieren.
Dieser Modus wird verwendet, um direkt zu scannen und Mesh-Daten zu generieren, geeignet für die meisten Scanszenarien.
Hinweis
Nach dem Wechsel vom Modus der globalen Marker in diesen Modus können Sie die Funktion Marker hinzufügen aktivieren, während Sie das entsprechende Objekt scannen, um neue Markerdaten zu erhalten.
Dieser Modus zeigt Punktwolkendaten während des Scannvorgangs an und reduziert den Speicherverbrauch.
Hinweis
Nach dem Wechsel vom Modus der globalen Marker in diesen Modus können Sie die Funktion Marker hinzufügen aktivieren, während Sie das entsprechende Objekt scannen, um neue Markerdaten zu erhalten.
Dieser Modus wird verwendet, wenn hohe Detailanforderungen an lokale Bereichsdaten bestehen oder wenn lokale Daten fehlen. Das Scannen mit diesem Modus kann die Scanzeiten verkürzen und die Scandaten genauer und vollständiger machen.
Hinweis
- Dieser Scanmodus ist nur verfügbar, wenn ein Mesh vorhanden ist.
- Die Laserlinie wechselt in diesem Modus automatisch auf 25 Linien.
- Wenn ein neuer Bereich gescannt wird, werden die neuen Mesh-Daten im normalen Punktabstand gescannt.
Vorsicht
- Sie können nach dem Betreten dieses Modus nicht in den Mesh-Modus zurückkehren.
- Dieser Modus ist nicht verfügbar, wenn der Punktabstand ≤ 0,1 mm beträgt.
- Die Hohe Option ist nicht verfügbar, wenn der Punktabstand zwischen 0,2 mm und 0,4 mm liegt.
- Sobald eine Option (Standard oder hoch) ausgewählt ist, kann sie nicht mehr geändert werden.
Dieser Modus eignet sich zum Scannen und Messen von Löchern (einschließlich runder, schlitzförmiger und rechteckiger) auf Blechstanzteilen.
Hinweis
Richtlinien zur Lochscannung
- Unterstützter Durchmesser: 4–25 mm.
- Empfohlene Dicke: Bis zu 4 mm für die besten Ergebnisse.
- Scannt Methode: Scannen Sie vertikal in das Loch. Stellen Sie sicher, dass genügend Marker um das Loch herum vorhanden sind, für die Ausrichtung.
- Umgebungstipps: Stellen Sie einen starken Kontrast zwischen dem Loch und seinem Hintergrund sicher, um die Scan-Genauigkeit zu verbessern.
 Ausrichtungsmodus¶
Ausrichtungsmodus¶
Hinweis
Nur während des IR-Scannens verfügbar.
| Ausrichtungsmodus | Beschreibung |
|---|---|
| Marker | Die Marker-Ausrichtung verwendet globale Markerdateien, um bei der Abschluss der Scanausrichtung zu helfen, wobei der Import einer vorhandenen globalen Markerdatei oder das Scannen eines Objekts mit mindestens 3 angebrachten Markern erforderlich ist. |
| Merkmal | Die Merkmalsausrichtung vervollständigt automatisch die Ausrichtung unter Verwendung der geometrischen Merkmale der Oberfläche des gescannten Objekts, wobei das gescannte Objekt über reichhaltige Oberflächenmerkmale verfügen muss. |
| Hybrid | Die hybride Ausrichtung nutzt umfassend die eigenen Merkmale des Objekts und die angebrachten Marker, um die Scanausrichtung abzuschließen, geeignet für Fälle, in denen die geometrische Merkmalsvielfalt der verschiedenen Teile des gescannten Objekts variiert. Mindestens 4 Marker müssen auf flachen Oberflächen angebracht werden. |
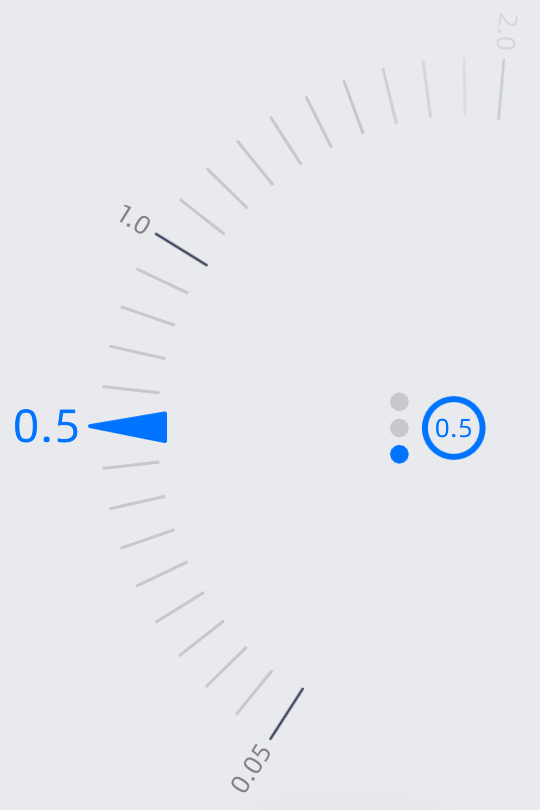
 Auflösung¶
Auflösung¶
| Lichtquelle | Scanmodus | Bereich |
|---|---|---|
| Laser | Mesh | 0,05 mm ~ 10,0 mm |
| Infrarot | Punktwolke | 0,05 mm ~ 3,0 mm |
Hinweis
Sobald es vorhandene Projekte innerhalb der Projektgruppe gibt, kann das neu erstellte Projekt die Auflösung nicht ändern.
Auflösung anpassen:
Col
- Tippen Sie auf
 , um schnell zwischen verschiedenen Auflösungen zu wechseln.
, um schnell zwischen verschiedenen Auflösungen zu wechseln. - Ziehen Sie den Winkelmesser, um feine Anpassungen vorzunehmen.
Col
 Helligkeit¶
Helligkeit¶
Die Helligkeit beeinflusst die Anzahl der vom Gerät erkannten Marker. Die Anpassung der geeigneten Helligkeit kann die Scanqualität verbessern, die Detailaufnahme optimieren und den Verlust von Details aufgrund unzureichender Helligkeit oder Reflexionen durch Überbelichtung vermeiden; unter verschiedenen Materialien und Umgebungslichtbedingungen kann sie Rauschen und fehlerhafte Daten reduzieren, die Genauigkeit verbessern und die Konsistenz der Scannergebnisse sicherstellen.
Die Helligkeit hat drei Stufen: Hoch, Mittel, Niedrig, mit drei voreingestellten Modi:
- Auto: Passt sich automatisch an die Umgebungshelligkeit an
- Draußen: Geeignet für helle Außenumgebungen
- Reflektierend: Geeignet für hochreflektierende Objekte
Für den Außenmodus wird empfohlen, den Filter vor dem Scannen magnetisch zu befestigen.

| Scanmodus | Modusbereich |
|---|---|
| Marker | Auto, Draußen |
| Photogrammetrie | Auto, Draußen |
| Punktwolke | Auto, Draußen, Reflektierend |
| Mesh&Teilauflösung | Auto, Draußen, Reflektierend |
 Arbeitsabstand¶
Arbeitsabstand¶
Er bezieht sich auf den effektiven Bereich der Scandaten, der je nach Größe des Objekts und den Ausrichtungsanforderungen angepasst werden kann. Ein größerer Wert erleichtert das Scannen von Daten aus der Ferne, aber einige Details können verloren gehen. Durch die Kontrolle des Arbeitsabstands können Sie Rauschdaten aus der Ferne oder Nähe herausfiltern.
Hinweis
- Nur das IR-Scannen unterstützt die Anpassung des Arbeitsabstands, mit einem Bereich von 160 mm - 1400 mm.
- Die maximale Erkennungsdistanz für Marker beträgt 800 mm; jenseits dieser Distanz wird empfohlen, die Merkmals- oder Hybridausrichtung zu verwenden.
Laserlinien¶
| Linienanzahl | Beschreibung |
|---|---|
| 93 Linien | Hauptsächlich zum schnellen Scannen von Objekten verwendet. |
| 25 Linien | Hauptsächlich zum Scannen lokaler Details verwendet. |
| 1 Linie | Hauptsächlich zum Scannen von tiefen Löchern und Spalten. |
Hinweis
Bei der Auswahl einer einzelnen Linie kann der Modus für tiefe Löcher aktiviert werden. Wenn aktiviert, wird das Scannen tiefer Löcher effektiver. Allerdings wird das Rauschen zunehmen.
 Datenqualitätsindikator¶
Datenqualitätsindikator¶
Zeigt die Scanqualität in Form eines Spektrums an, wobei Blau hochwertige gescannte Daten darstellt und Gelb unzureichendes Scannen anzeigt, das weiteres Scannen erfordert. Unzureichend gescannte Daten können nach der Datenverarbeitung verschwinden oder abnormal angezeigt werden.
 Ebenenerkennung¶
Ebenenerkennung¶
Hinweis
Nur während des IR-Scannens für die Merkmalsausrichtung oder hybride Ausrichtung unterstützt.
Sobald aktiviert, erkennt es automatisch die Ebene, auf der sich das gescannte Objekt befindet, wodurch die Wahrscheinlichkeit von Fehlscans von Ebenen oder Merkmalsobjekten verringert wird, jedoch können Ebenen oder Objekte mit wenigen Merkmalen nicht gescannt werden.
Bei der hybriden Ausrichtung erfordert das Scannen einer Ebene das Anbringen von 4 Markern. Bei der Merkmalsausrichtung wird Ihnen geraten, nicht direkt auf die Ebene zu scannen.